Что нам понадобится

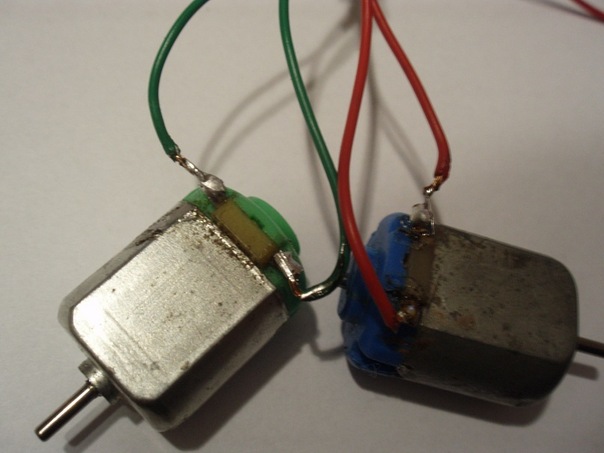
1. Самое главное - движетель! (моторчик)
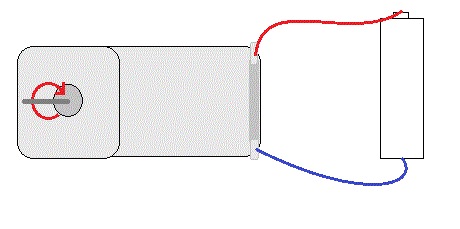
Моторчик нам нужен не простой, а с эксцентриком. Его можно найти в мобильном телефоне.
Как они выглядят:

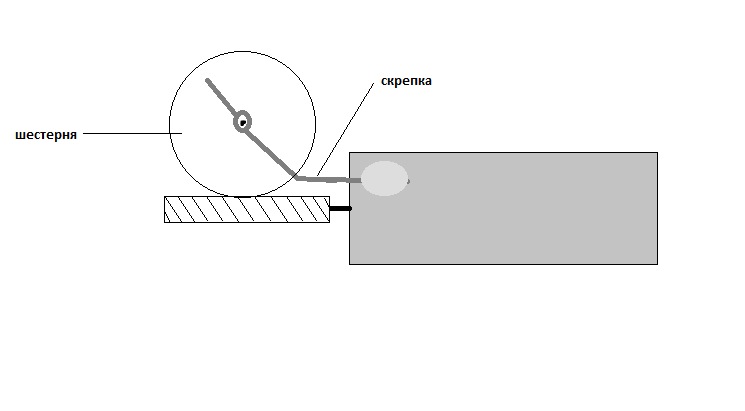
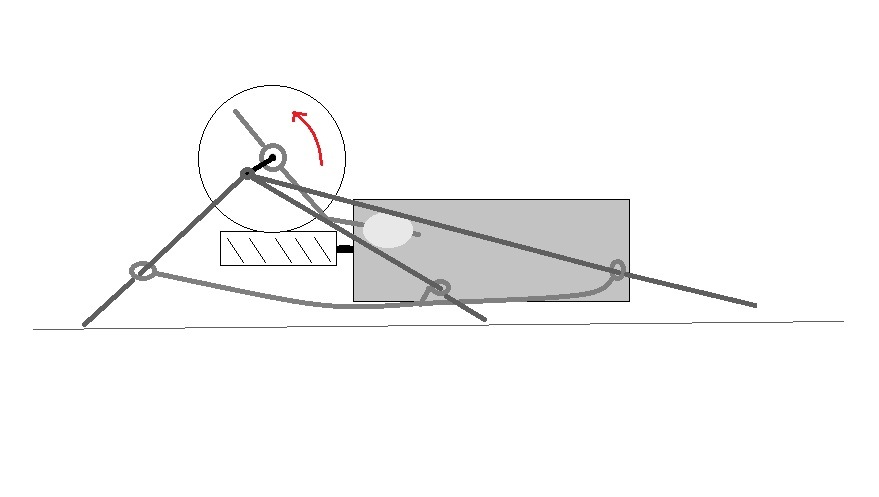
Если вы не достали такой моторчик, то сделайте как я.
Нацепите кусочек ластика на вал мотора.

2. Шасси
Можно использовать старые зубные щетки, только не всю щетку, а ее головку.

Или же что нибудь другое, на что у вас фантазии хватит=)
3. Батарея
Можно использовать таблетки на 3v
Я же взял аккумулятор от телефона (его же использовал как платформу=)
Приступаем к сборке!
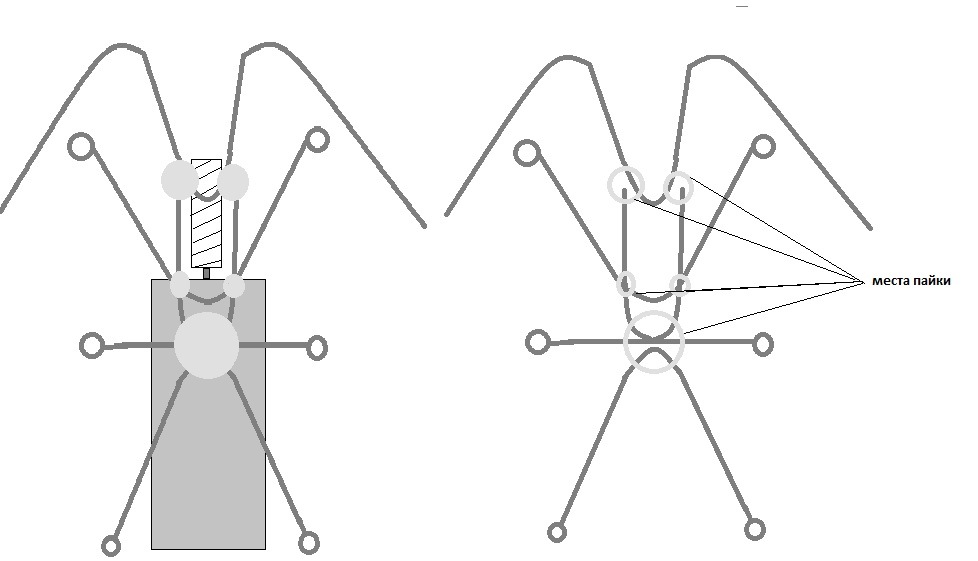
1. Собераем робота.
В моем случае надо приклеить 2 головки от щеток к аккумулятору, что я и сделал.

Потом приклеил моторчик на аккумулятор.
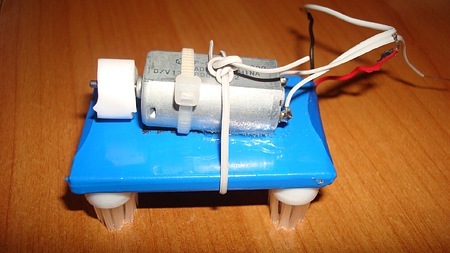
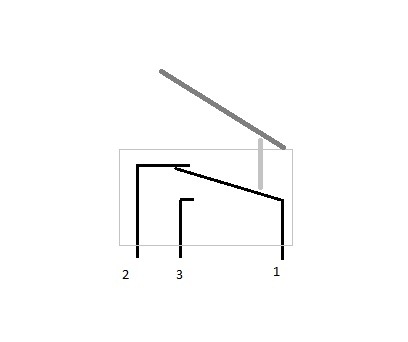
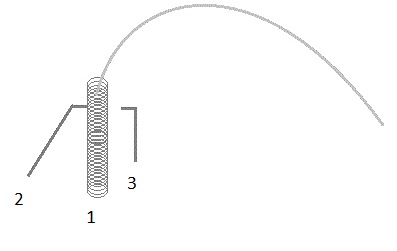
Вы же (если достали маленький вибромоторчик) можете просто приклеить его к одной щетке, примерно так:
 ...
Читать дальше »
...
Читать дальше »