Бокс под батарейки х1 Нам понадобиться футляр под 2 батарейки AAA или AA
Моторы х2 Моторов в нашем роботе 2 и нужно что бы они были одинаковые, имели одинаковую скорость врашения, мощность и рабочее напряжение. SPDT переключатель ( микрушка) х2
Теперь подробнее о некоторых деталях.
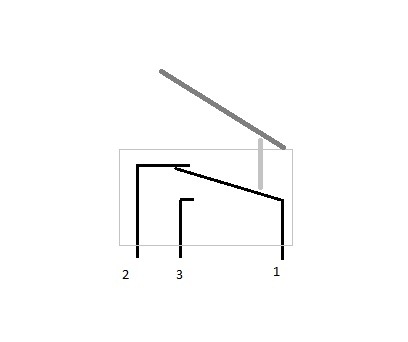
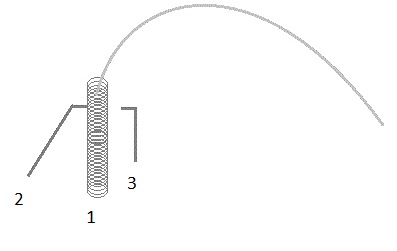
принципиальная схема и устройство микрушки. SPDT микрушка. Контакты 1 и 2 замкнуты, но если нажать язычок, то они разомкнуться и замкнуться 1 и 3. Но если нет возможности приобрести две микрушки, то их можно сделать. В самодельном "датчике" контакт 1 заменён пружиной, 2 и 3 жестяными контактами.
Самодельная микрушка. О том как её сделать будет сказано ниже.
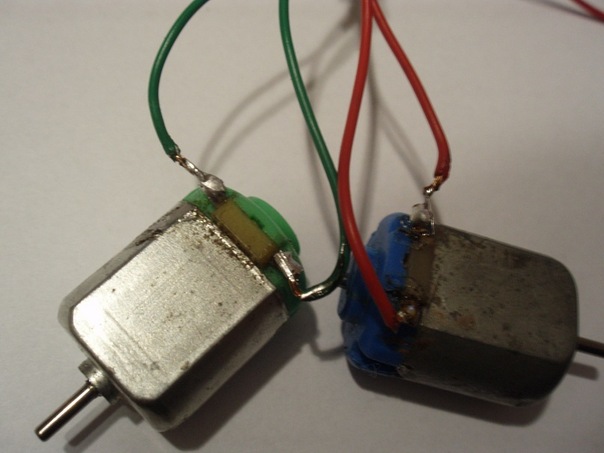
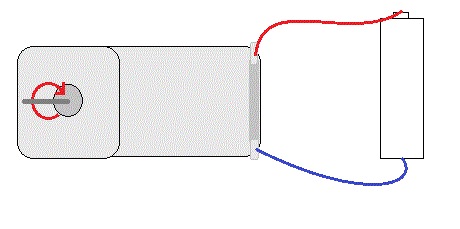
Определяем полярность моторов. При подключение источника питания если ось мотора будет вращаться как указано стрелкой(по часовой стрелке) полярность мотора такая же как и у батарейки, если в другую, то полярность мотора противоположна полярности батарейки.
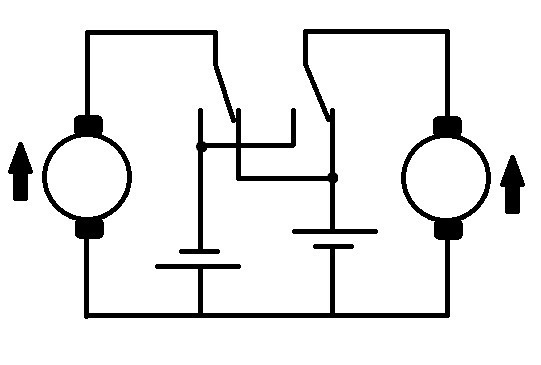
Сборка Ознакомимся с принципиальной схемой. В состоянии пококоя оба мотора вращаются в разные стороны, правый по часовой стрелке, а левый против часовой стрелки и робот двигается вперёд, но если робот столкнётся с препятствием, то оба мотора будут вращаться в одну сторону и робот развернётся. Если препятствие справа, то по часовой стрелке, а если слева, то против. Как видно правая батарейка отвечает за движение вперёд, а левая назад.
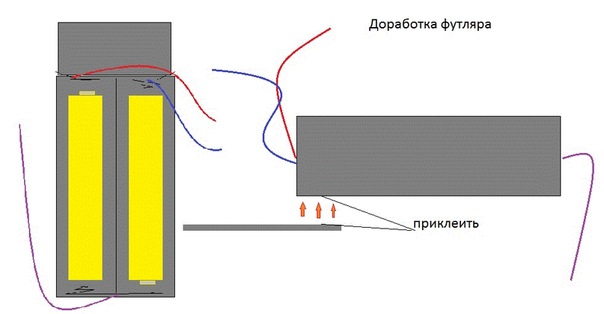
Доработка футляра К футляру нужно приклеить пластинку из пластмассы для крепления микрушек и моторов.
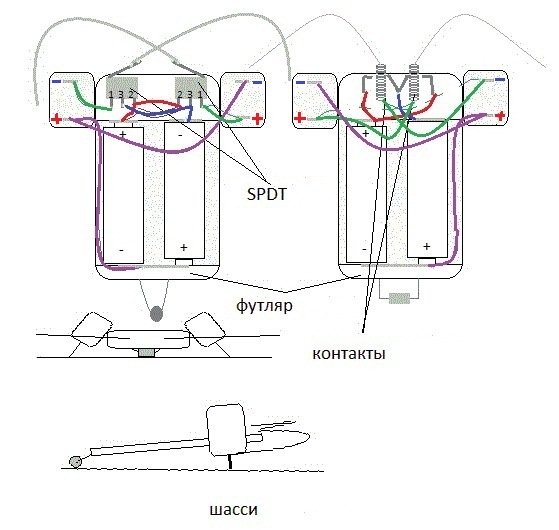
Дальше датчики, моторы и монтаж. С SPDT , их просто приклеивают на эти позиции и припаивают в хвостикам усы как на рисунке 9. Рисунок 9.
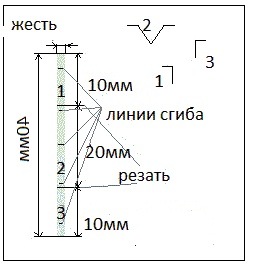
А вот самодельные надо сначала сделать =) Сначала возьмём жесть от консервной или кофейной банки и вырежем полоску длиной 40мм и шириной 5мм. Её разрезаем на три части две по 10мм и одну 20мм, после чего из них выгибаем контакты той формы которая показана и соответствует каждой полоске.
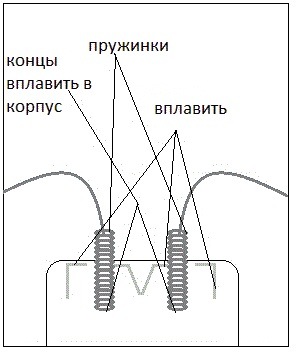
Потом контакты просто в плавляют в пластик как на рисунке, пружинки можно взять из ручек, и их концы вплавить в пластик. К противоположным припаивают усы.
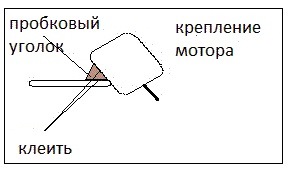
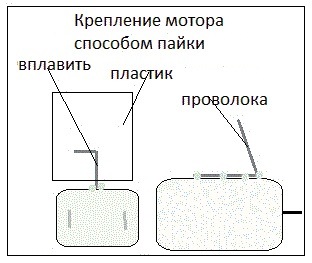
Далее моторы. Есть два способа их прикрепить, приклеить через пробковый уголок и припаять к корпусу мотора проволоку и вплавить её в пластик.
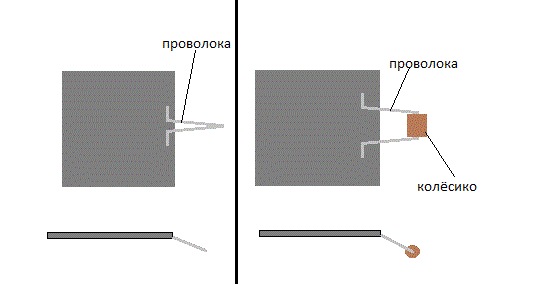
Дальше всё спаиваем проводами как на рисунке 9 и проверим по принципиальной схеме. задняя опора делается из проволоки, но если в наличии есть колёсико, то можно его провздеть через опору. Концы вплавляются в пластик.
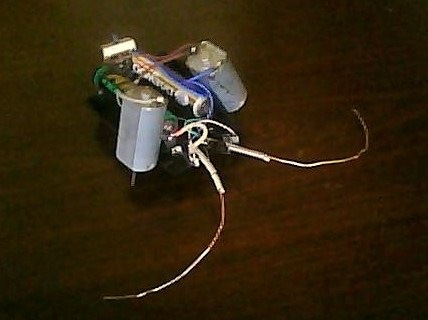
Итоги Должно получиться примерно так. (Робот с самодельными контактами сделанный мною) И видео робота сделаного мною с SPDT