Схему этого робта придумал сам, оформил его в виде робота Wall-e. Колёса приводятся моторами от DVD привода по средствам фрикционной передачи ось-шина.
Робот имеет две совмещённые функции - обходить препятствия пробираясь к свету.
Питание бота 3,7 - 4,5 В, фоторезисторы советские неизвесные со странной характеристикой- на свету 20кОм, а в темноте 2МОм!
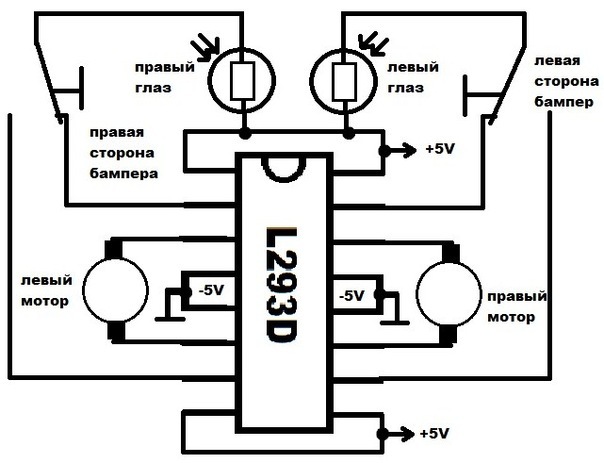
Тактильный датчик- сдвоенный SPDT переключатель. Основа робота - L293D. Робот очень хорошо реагирует на красный свет.
Принципиальная схема.
Робот может обходить препятствия как за счёт тактильного датчика, так и по средсвам "глаз" если препятствие